#include <itkOrthogonallyCorrected2DParametricPath.h>
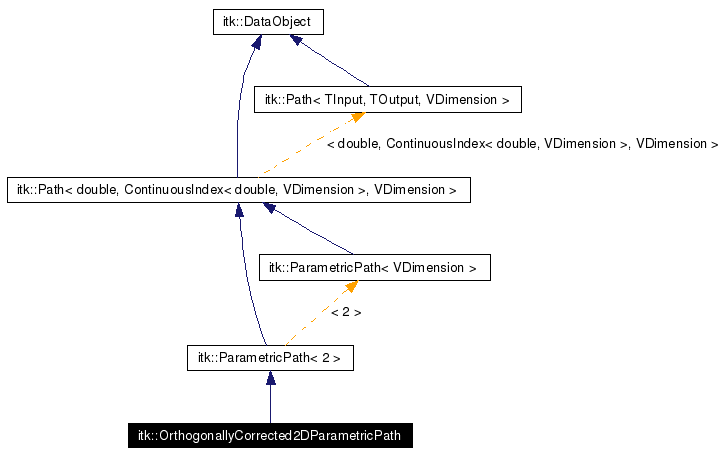
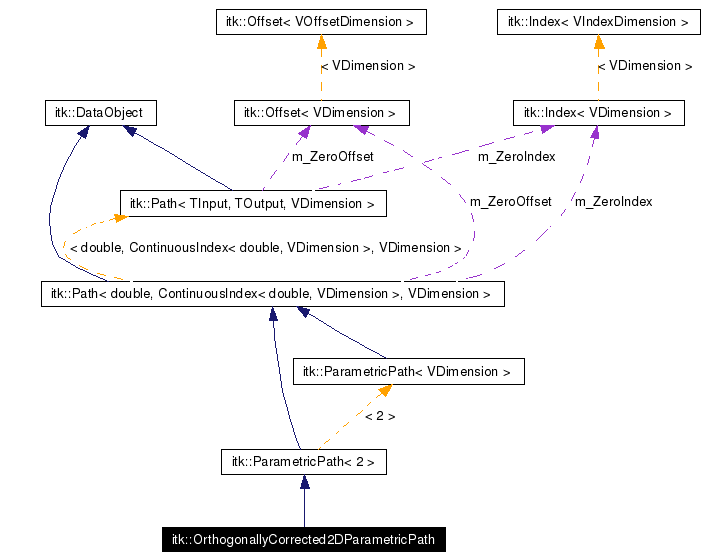
Inheritance diagram for itk::OrthogonallyCorrected2DParametricPath:
Description
Definition at line 47 of file itkOrthogonallyCorrected2DParametricPath.h.
|
|
Reimplemented from itk::ParametricPath< 2 >. Definition at line 55 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Basic data-structure types used Reimplemented from itk::ParametricPath< 2 >. Definition at line 68 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
All paths must be mapable to index space Reimplemented from itk::ParametricPath< 2 >. Definition at line 69 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Input type Reimplemented from itk::ParametricPath< 2 >. Definition at line 58 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Reimplemented from itk::ParametricPath< 2 >. Definition at line 70 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Definition at line 73 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Definition at line 72 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Definition at line 75 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Definition at line 74 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Output type Reimplemented from itk::ParametricPath< 2 >. Definition at line 64 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Reimplemented from itk::ParametricPath< 2 >. Definition at line 54 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Standard class typedefs. Reimplemented from itk::ParametricPath< 2 >. Definition at line 52 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Reimplemented from itk::ParametricPath< 2 >. Definition at line 53 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Reimplemented from itk::ParametricPath< 2 >. Definition at line 71 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
|
|
|
Definition at line 116 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Where does the path end (what is the last valid input value)? This value is sometimes used by IncrementInput() to go to the end of a path. Reimplemented from itk::Path< double, ContinuousIndex< double, VDimension >, VDimension >. Definition at line 107 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Return the location of the parametric path at the specified location. Implements itk::Path< double, ContinuousIndex< double, VDimension >, VDimension >. |
|
|
Evaluate the first derivative of the ND output with respect to the 1D input. This is a very simple and naive numerical derivative, and it sould be overloaded with a proper closed-form derivative function in all children. Nevertheless, users who need to create their own parametric classes for their private research need not reimplement this function if their work does not need the derivative operator. |
|
|
Return the nearest index to the parametric path at the specified location. This is a wrapper to Evaluate(). Implements itk::Path< double, ContinuousIndex< double, VDimension >, VDimension >. |
|
|
|
|
|
Run-time type information (and related methods). Reimplemented from itk::ParametricPath< 2 >. |
|
|
|
|
|
|
|
|
Increment the input variable passed by reference such that the ND index of the path moves to its next vertex-connected (8-connected in 2D) neighbor. Return the Index-space offset of the path from its prior input to its new input. If the path is unable to increment, input is not changed and an offset of Zero is returned. Children are not required to implement bounds checking. This is a fairly slow, iterative algorithm that numerically converges to the next index along the path, in a vertex-connected (8-connected in 2D) fashion. When possible, children of this class should overload this function with something more efficient. WARNING: This default implementation REQUIRES that the ND endpoint of the path be either unique or coincident only with the startpoint, since it uses the endpoint as a stopping condition. Implements itk::Path< double, ContinuousIndex< double, VDimension >, VDimension >. |
|
|
Needed for Pipelining Definition at line 96 of file itkOrthogonallyCorrected2DParametricPath.h. References NULL. |
|
||||||||||||||||
|
Path dimension. The dimension of a path is fixed at construction. |
|
|
New() method for dynamic construction |
|
|
|
|
|
|
|
||||||||||||
|
Reimplemented from itk::ParametricPath< 2 >. |
|
|
|
|
|
Set pointer to the original path. The path MUST be continuous in its first derivative to prevent discontinuities in the corrected path. The path should also be closed, since the first correction is applied to both the beginnning and the end of the original path. |
|
|
Set table of evenly-spaced orthogonal offsets for the original path. |
|
|
Where does the path begin? For most types of paths, the path will begin at zero. This value can be overridden in children, and is necessary for iterators to know how to go to the beginning of a path. Reimplemented from itk::Path< double, ContinuousIndex< double, VDimension >, VDimension >. Definition at line 103 of file itkOrthogonallyCorrected2DParametricPath.h. |
|
|
Default 1D input increment amount to trace along the path. Also, the value used by the defualt implementation of EvaluateDerivative() for numerically approximating the derivative with the change over a single default-sized step. (NOTE that the default implementation of EvaluateDerivative() should never be used in practice, but users or lazzy developers may nevertheless unwisely choose to do so anyway.) For integer- input-types, 1 is probably the correct value. For double-input-types, either 1 or 0.1 are probably good values. This value should be set in the constructor of all instantiable children. Values set in child constructors overwrite values set in parent constructors. Definition at line 136 of file itkParametricPath.h. |
 1.4.2 written by Dimitri van Heesch,
© 1997-2000
1.4.2 written by Dimitri van Heesch,
© 1997-2000