#include <itkPoint.h>
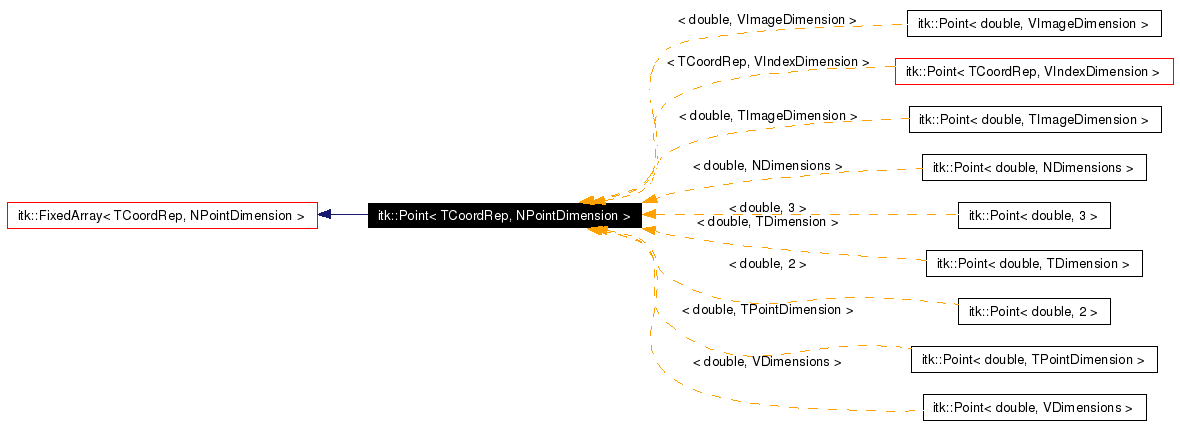
Inheritance diagram for itk::Point< TCoordRep, NPointDimension >:
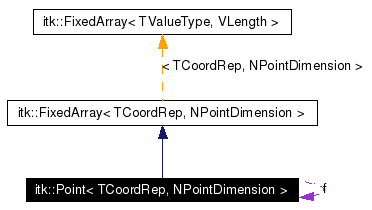
Point is a templated class that holds a set of coordinates (components). Point can be used as the data type held at each pixel in an Image or at each vertex of an Mesh. The template parameter T can be any data type that behaves like a primitive (or atomic) data type (int, short, float, complex). The NPointDimension defines the number of components in the point array.
Definition at line 45 of file itkPoint.h.
Public Types | |
| typedef FixedArray< TCoordRep, NPointDimension > | BaseArray |
| typedef BaseArray::ConstIterator | ConstIterator |
| typedef TCoordRep | CoordRepType |
| typedef BaseArray::Iterator | Iterator |
| typedef NumericTraits< ValueType >::RealType | RealType |
| typedef Point | Self |
| typedef FixedArray< TCoordRep, NPointDimension > | Superclass |
| typedef TCoordRep | ValueType |
| typedef Vector< ValueType, NPointDimension > | VectorType |
Public Member Functions | |
| template<typename TCoordRepB> | |
| Copy from another Point with a different representation type *Casting is done with C Like rules *void | CastFrom (const Point< TCoordRepB, NPointDimension > &pa) |
| template<typename TCoordRepB> | |
| Compute the Euclidean Distance from this point to another point *with a different representation type Casting is done with C Like rules *RealType | EuclideanDistanceTo (const Point< TCoordRepB, NPointDimension > &pa) const |
| Set the current point to a barycentric combination of the two points *given as arguments **param f alpha the second is multiplied *by * | f (1-\alpha)\f $ |
| vnl_vector< TCoordRep > | Get_vnl_vector (void) const |
| vnl_vector_ref< TCoordRep > | Get_vnl_vector (void) |
| VectorType | GetVectorFromOrigin () const |
| vnl_vector< TCoordRep > | GetVnlVector (void) const |
| vnl_vector_ref< TCoordRep > | GetVnlVector (void) |
| itkStaticConstMacro (PointDimension, unsigned int, NPointDimension) | |
| Set the current point to a barycentric combination of an array of N points *An array | of (N-1) values is expected to weight the contribution of the *first(N-1) points |
| Pass through assignment | operator for the Array base class.*/Point &operator= (const Self &r) |
| Compare two points for inequality *bool | operator!= (const Self &pt) const |
| Self | operator+ (const VectorType &vec) const |
| const Self & | operator+= (const VectorType &vec) |
| Self | operator- (const VectorType &vec) const |
| VectorType | operator- (const Self &pnt) const |
| const Self & | operator-= (const VectorType &vec) |
| Point & | operator= (const ValueType r[NPointDimension]) |
| Compare two points for equality *bool | operator== (const Self &pt) const |
| Point (const ValueType r[PointDimension]) | |
| Pass through constructor for the Array base class * | Point (const Self &r) |
| Point () | |
| Set the current point to a barycentric combination of three points *Two values are expected to weight the contribution of the first two *the weight of for the third point is computed to ensure that the three weights *sum **This method The resulting point will alway be placed *inside the triangle formed by the three points given as arguments *void | SetToBarycentricCombination (const Self &A, const Self &B, const Self &C, double weightA, double weightB) |
| void | SetToMidPoint (const Self &, const Self &) |
| template<typename TCoordRepB> | |
| RealType | SquaredEuclideanDistanceTo (const Point< TCoordRepB, NPointDimension > &pa) const |
Static Public Member Functions | |
| static unsigned int | GetPointDimension () |
Public Attributes | |
| Set the current point to a barycentric combination of an array of N points *An array the weight of the Nth point is computed to ensure that *the N weights sum **This method | computes: * * \f[ * \overrightarrow{P}= \sum_{i=1}^{N-1} w_i * \overrightarrow{P}_i + \left(1- \sum_{i=1}^{N-1} w_i\right) * \overrightarrow{P}_N * \f] */ void SetToBarycentricCombination( const Self * P |
| Set the current point to a barycentric combination of three points *Two values are expected to weight the contribution of the first two *the weight of for the third point is computed to ensure that the three weights *sum **This method | computes: * * \f[ * \overrightarrow{P}= w_1 * \overrightarrow{P}_1 + w_2 * \overrightarrow{P}_2 + (1-w_1-w_2 ) * \overrightarrow{P}_3 * \f] * * If the two weight are \f$ \in [0 |
| Set the current point to a barycentric combination of three points *Two values are expected to weight the contribution of the first two *the weight of for the third point is computed to ensure that the three weights *sum **This method | f |
| Set the current point to a barycentric combination of the two points *given as arguments **param f alpha the second is multiplied *by *and the sum is stored in the Point on which the *method is invoked **f *[*\overrightarrow{P}=\alpha *\overrightarrow{A}+(1-\alpha)*\overrightarrow{B}*\f]*If the value of f alpha in | f [0, 1] |
| Set the current point to a barycentric combination of the two points *given as arguments **param f alpha | f |
| Set the current point to a barycentric combination of an array of N points *An array the weight of the Nth point is computed to ensure that *the N weights sum **This method const double unsigned int | N |
| Set the current point to a barycentric combination of three points *Two values are expected to weight the contribution of the first two | points |
| Set the current point to a barycentric combination of an array of N points *An array the weight of the Nth point is computed to ensure that *the N weights sum **This method const double * | weights |
|
|||||
|
The Array type from which this Vector is derived. Reimplemented in itk::ContinuousIndex< TCoordRep, VIndexDimension >. Definition at line 63 of file itkPoint.h. |
|
|||||
|
Reimplemented in itk::ContinuousIndex< TCoordRep, VIndexDimension >. Definition at line 65 of file itkPoint.h. |
|
|||||
|
Reimplemented in itk::ContinuousIndex< TCoordRep, VIndexDimension >. Definition at line 55 of file itkPoint.h. |
|
|||||
|
Reimplemented in itk::ContinuousIndex< TCoordRep, VIndexDimension >. Definition at line 64 of file itkPoint.h. |
|
|||||
|
Definition at line 57 of file itkPoint.h. |
|
|||||
|
Standard class typedefs. Reimplemented in itk::ContinuousIndex< TCoordRep, VIndexDimension >. Definition at line 49 of file itkPoint.h. |
|
|||||
|
Reimplemented in itk::ContinuousIndex< TCoordRep, VIndexDimension >. Definition at line 50 of file itkPoint.h. |
|
|||||
|
ValueType can be used to declare a variable that is the same type as a data element held in an Point. Reimplemented in itk::ContinuousIndex< TCoordRep, VIndexDimension >. Definition at line 54 of file itkPoint.h. |
|
|||||
|
VectorType define the difference between two Points Definition at line 72 of file itkPoint.h. |
|
|||||||||
|
Default constructor has nothing to do. Definition at line 75 of file itkPoint.h. |
|
||||||||||
|
Definition at line 78 of file itkPoint.h. |
|
||||||||||
|
Definition at line 79 of file itkPoint.h. |
|
||||||||||||||
|
Definition at line 219 of file itkPoint.h. |
|
||||||||||||||
|
Definition at line 250 of file itkPoint.h. |
|
||||||||||
|
|
|
||||||||||
|
Get a vnl_vector with a copy of the internal memory block.
|
|
||||||||||
|
Get a vnl_vector_ref referencing the same memory block
|
|
|||||||||
|
Get the dimension (size) of the point. Definition at line 68 of file itkPoint.h. |
|
|||||||||
|
Access an element of a point. |
|
||||||||||
|
Get a vnl_vector with a copy of the internal memory block. |
|
||||||||||
|
Get a vnl_vector_ref referencing the same memory block |
|
||||||||||||||||||||
|
Dimension of the Space |
|
||||||||||
|
|
|
||||||||||
|
|
|
||||||||||
|
Definition at line 100 of file itkPoint.h. |
|
||||||||||
|
Add a vector to a point. Return a new point. |
|
||||||||||
|
Point operator+=. Adds a vector to the current point. |
|
||||||||||
|
Subtract a vector from a point. Return a new point. |
|
||||||||||
|
Computes the Vector difference between two points |
|
||||||||||
|
Point operator-=. Subtracts a vector from a current point. |
|
||||||||||
|
|
|
||||||||||
|
Definition at line 89 of file itkPoint.h. |
|
||||||||||||||||||||||||||||
|
|
|
||||||||||||||||
|
Set to median point between the two points given as arguments This method computes:
using the two Points given as arguments, and store the result in the Point on which the method is invoked. |
|
||||||||||||||
|
Compute the Squared Euclidean Distance from this point to another point with a different representation type. Casting is done with C-Like rules Definition at line 233 of file itkPoint.h. |
|
|||||
|
Definition at line 212 of file itkPoint.h. |
|
|||||
|
Definition at line 167 of file itkPoint.h. |
|
|||||
|
Definition at line 167 of file itkPoint.h. |
|
|||||
|
Definition at line 167 of file itkPoint.h. |
|
|||||
|
Initial value: Definition at line 157 of file itkPoint.h. |
|
|||||
|
Definition at line 212 of file itkPoint.h. |
|
|||||
|
Definition at line 167 of file itkPoint.h. |
|
|||||
|
Definition at line 212 of file itkPoint.h. |
 1.4.2 written by Dimitri van Heesch,
© 1997-2000
1.4.2 written by Dimitri van Heesch,
© 1997-2000
![\[ \overrightarrow{P}=\frac{(\overrightarrow{A}+\overrightarrow{B})}{2} \]](form_171.png)