|
| using | CenterType = typename Superclass::CenterType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = typename Superclass::InputCovariantVectorType |
| |
| using | InputPointType = typename Superclass::InputPointType |
| |
| using | InputVectorType = typename Superclass::InputVectorType |
| |
| using | InputVnlVectorType = typename Superclass::InputVnlVectorType |
| |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| |
| using | InverseMatrixType = typename Superclass::InverseMatrixType |
| |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| |
| using | InverseTransformBaseType = typename Superclass::InverseTransformBaseType |
| |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| |
| using | JacobianType = typename Superclass::JacobianType |
| |
| using | MatrixType = typename Superclass::MatrixType |
| |
| using | OffsetType = typename Superclass::OffsetType |
| |
| using | OutputCovariantVectorType = typename Superclass::OutputCovariantVectorType |
| |
| using | OutputPointType = typename Superclass::OutputPointType |
| |
| using | OutputVectorType = typename Superclass::OutputVectorType |
| |
| using | OutputVnlVectorType = typename Superclass::OutputVnlVectorType |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = typename Superclass::ScalarType |
| |
| using | Self = CenteredEuler3DTransform |
| |
| using | Superclass = Euler3DTransform< TParametersValueType > |
| |
| using | TranslationType = typename Superclass::TranslationType |
| |
| using | TranslationValueType = typename Superclass::TranslationValueType |
| |
| using | AngleType = typename Superclass::ScalarType |
| |
| using | CenterType = typename Superclass::CenterType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = typename Superclass::InputCovariantVectorType |
| |
| using | InputPointType = typename Superclass::InputPointType |
| |
| using | InputVectorType = typename Superclass::InputVectorType |
| |
| using | InputVnlVectorType = typename Superclass::InputVnlVectorType |
| |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| |
| using | InverseMatrixType = typename Superclass::InverseMatrixType |
| |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| |
| using | JacobianType = typename Superclass::JacobianType |
| |
| using | MatrixType = typename Superclass::MatrixType |
| |
| using | OffsetType = typename Superclass::OffsetType |
| |
| using | OutputCovariantVectorType = typename Superclass::OutputCovariantVectorType |
| |
| using | OutputPointType = typename Superclass::OutputPointType |
| |
| using | OutputVectorType = typename Superclass::OutputVectorType |
| |
| using | OutputVnlVectorType = typename Superclass::OutputVnlVectorType |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = typename Superclass::ScalarType |
| |
| using | Self = Euler3DTransform |
| |
| using | Superclass = Rigid3DTransform< TParametersValueType > |
| |
| using | TranslationType = typename Superclass::TranslationType |
| |
| using | CenterType = typename Superclass::CenterType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = typename Superclass::InputCovariantVectorType |
| |
| using | InputPointType = typename Superclass::InputPointType |
| |
| using | InputVectorType = typename Superclass::InputVectorType |
| |
| using | InputVnlVectorType = typename Superclass::InputVnlVectorType |
| |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| |
| using | InverseMatrixType = typename Superclass::InverseMatrixType |
| |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| |
| using | InverseTransformBaseType = typename Superclass::InverseTransformBaseType |
| |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| |
| using | JacobianType = typename Superclass::JacobianType |
| |
| using | MatrixType = typename Superclass::MatrixType |
| |
| using | MatrixValueType = typename Superclass::MatrixValueType |
| |
| using | OffsetType = typename Superclass::OffsetType |
| |
| using | OutputCovariantVectorType = typename Superclass::OutputCovariantVectorType |
| |
| using | OutputPointType = typename Superclass::OutputPointType |
| |
| using | OutputVectorType = typename Superclass::OutputVectorType |
| |
| using | OutputVectorValueType = typename Superclass::OutputVectorValueType |
| |
| using | OutputVnlVectorType = typename Superclass::OutputVnlVectorType |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = typename Superclass::ScalarType |
| |
| using | Self = Rigid3DTransform |
| |
| using | Superclass = MatrixOffsetTransformBase< TParametersValueType, 3, 3 > |
| |
| using | TranslationType = typename Superclass::TranslationType |
| |
| using | CenterType = InputPointType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = CovariantVector< TParametersValueType, Self::InputSpaceDimension > |
| |
| using | InputDiffusionTensor3DType = typename Superclass::InputDiffusionTensor3DType |
| |
| using | InputPointType = Point< TParametersValueType, Self::InputSpaceDimension > |
| |
| using | InputPointValueType = typename InputPointType::ValueType |
| |
| using | InputSymmetricSecondRankTensorType = typename Superclass::InputSymmetricSecondRankTensorType |
| |
| using | InputTensorEigenVectorType = CovariantVector< TParametersValueType, InputDiffusionTensor3DType::Dimension > |
| |
| using | InputVectorPixelType = typename Superclass::InputVectorPixelType |
| |
| using | InputVectorType = Vector< TParametersValueType, Self::InputSpaceDimension > |
| |
| using | InputVnlVectorType = vnl_vector_fixed< TParametersValueType, Self::InputSpaceDimension > |
| |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| |
| using | InverseMatrixType = Matrix< TParametersValueType, Self::InputSpaceDimension, Self::OutputSpaceDimension > |
| |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| |
| using | InverseTransformBaseType = typename Superclass::InverseTransformBaseType |
| |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| |
| using | JacobianType = typename Superclass::JacobianType |
| |
| using | MatrixType = Matrix< TParametersValueType, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| |
| using | MatrixValueType = typename MatrixType::ValueType |
| |
| using | OffsetType = OutputVectorType |
| |
| using | OffsetValueType = typename OffsetType::ValueType |
| |
| using | OutputCovariantVectorType = CovariantVector< TParametersValueType, Self::OutputSpaceDimension > |
| |
| using | OutputDiffusionTensor3DType = typename Superclass::OutputDiffusionTensor3DType |
| |
| using | OutputPointType = Point< TParametersValueType, Self::OutputSpaceDimension > |
| |
| using | OutputPointValueType = typename OutputPointType::ValueType |
| |
| using | OutputSymmetricSecondRankTensorType = typename Superclass::OutputSymmetricSecondRankTensorType |
| |
| using | OutputVectorPixelType = typename Superclass::OutputVectorPixelType |
| |
| using | OutputVectorType = Vector< TParametersValueType, Self::OutputSpaceDimension > |
| |
| using | OutputVectorValueType = typename OutputVectorType::ValueType |
| |
| using | OutputVnlVectorType = vnl_vector_fixed< TParametersValueType, Self::OutputSpaceDimension > |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = typename Superclass::ScalarType |
| |
| using | Self = MatrixOffsetTransformBase |
| |
| using | Superclass = Transform< TParametersValueType, NInputDimensions, NOutputDimensions > |
| |
| using | TransformCategoryType = typename Superclass::TransformCategoryType |
| |
| using | TranslationType = OutputVectorType |
| |
| using | TranslationValueType = typename TranslationType::ValueType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | DerivativeType = Array< ParametersValueType > |
| |
| using | DirectionChangeMatrix = Matrix< double, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = CovariantVector< TParametersValueType, NInputDimensions > |
| |
| using | InputDiffusionTensor3DType = DiffusionTensor3D< TParametersValueType > |
| |
| using | InputDirectionMatrix = Matrix< double, Self::InputSpaceDimension, Self::InputSpaceDimension > |
| |
| using | InputPointType = Point< TParametersValueType, NInputDimensions > |
| |
| using | InputSymmetricSecondRankTensorType = SymmetricSecondRankTensor< TParametersValueType, NInputDimensions > |
| |
| using | InputVectorPixelType = VariableLengthVector< TParametersValueType > |
| |
| using | InputVectorType = Vector< TParametersValueType, NInputDimensions > |
| |
| using | InputVnlVectorType = vnl_vector_fixed< TParametersValueType, NInputDimensions > |
| |
| using | InverseJacobianPositionType = vnl_matrix_fixed< ParametersValueType, NInputDimensions, NOutputDimensions > |
| |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| |
| using | InverseTransformBaseType = Transform< TParametersValueType, NOutputDimensions, NInputDimensions > |
| |
| using | JacobianPositionType = vnl_matrix_fixed< ParametersValueType, NOutputDimensions, NInputDimensions > |
| |
| using | JacobianType = Array2D< ParametersValueType > |
| |
| using | MatrixType = Matrix< TParametersValueType, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| |
| using | NumberOfParametersType = typename Superclass::NumberOfParametersType |
| |
| using | OutputCovariantVectorType = CovariantVector< TParametersValueType, NOutputDimensions > |
| |
| using | OutputDiffusionTensor3DType = DiffusionTensor3D< TParametersValueType > |
| |
| using | OutputDirectionMatrix = Matrix< double, Self::OutputSpaceDimension, Self::OutputSpaceDimension > |
| |
| using | OutputPointType = Point< TParametersValueType, NOutputDimensions > |
| |
| using | OutputSymmetricSecondRankTensorType = SymmetricSecondRankTensor< TParametersValueType, NOutputDimensions > |
| |
| using | OutputVectorPixelType = VariableLengthVector< TParametersValueType > |
| |
| using | OutputVectorType = Vector< TParametersValueType, NOutputDimensions > |
| |
| using | OutputVnlVectorType = vnl_vector_fixed< TParametersValueType, NOutputDimensions > |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = ParametersValueType |
| |
| using | Self = Transform |
| |
| using | Superclass = TransformBaseTemplate< TParametersValueType > |
| |
| using | TransformCategoryType = typename Superclass::TransformCategoryType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = OptimizerParameters< FixedParametersValueType > |
| |
| using | FixedParametersValueType = double |
| |
| using | NumberOfParametersType = IdentifierType |
| |
| using | ParametersType = OptimizerParameters< ParametersValueType > |
| |
| using | ParametersValueType = TParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | Self = TransformBaseTemplate |
| |
| using | Superclass = Object |
| |
| enum | TransformCategoryType {
UnknownTransformCategory =0,
Linear =1,
BSpline =2,
Spline =3,
DisplacementField =4,
VelocityField =5
} |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | Self = Object |
| |
| using | Superclass = LightObject |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | Self = LightObject |
| |
|
| void | ComputeJacobianWithRespectToParameters (const InputPointType &p, JacobianType &jacobian) const override |
| |
| virtual ::itk::LightObject::Pointer | CreateAnother () const |
| |
| bool | GetInverse (Self *inverse) const |
| |
| InverseTransformBasePointer | GetInverseTransform () const override |
| |
| virtual const char * | GetNameOfClass () const |
| |
| const ParametersType & | GetParameters () const override |
| |
| void | SetParameters (const ParametersType ¶meters) override |
| |
| void | ComputeJacobianWithRespectToParameters (const InputPointType &p, JacobianType &jacobian) const override |
| |
| virtual ::itk::LightObject::Pointer | CreateAnother () const |
| |
| virtual ScalarType | GetAngleX () const |
| |
| virtual ScalarType | GetAngleY () const |
| |
| virtual ScalarType | GetAngleZ () const |
| |
| const FixedParametersType & | GetFixedParameters () const override |
| |
| const ParametersType & | GetParameters () const override |
| |
| void | SetFixedParameters (const FixedParametersType ¶meters) override |
| |
| void | SetIdentity () override |
| |
| void | SetParameters (const ParametersType ¶meters) override |
| |
| void | SetRotation (ScalarType angleX, ScalarType angleY, ScalarType angleZ) |
| |
| virtual void | SetComputeZYX (const bool flag) |
| |
| virtual bool | GetComputeZYX () const |
| |
| virtual ::itk::LightObject::Pointer | CreateAnother () const |
| |
| bool | MatrixIsOrthogonal (const MatrixType &matrix, const TParametersValueType tolerance=MatrixOrthogonalityTolerance< TParametersValueType >::GetTolerance()) |
| |
| void | SetMatrix (const MatrixType &matrix) override |
| |
| virtual void | SetMatrix (const MatrixType &matrix, const TParametersValueType tolerance) |
| |
| void | SetParameters (const ParametersType ¶meters) override |
| |
| void | Translate (const OffsetType &offset, bool pre=false) |
| |
| void | Compose (const Self *other, bool pre=false) |
| |
| void | ComputeInverseJacobianWithRespectToPosition (const InputPointType &x, InverseJacobianPositionType &jac) const override |
| |
| void | ComputeJacobianWithRespectToParameters (const InputPointType &x, JacobianType &j) const override |
| |
| void | ComputeJacobianWithRespectToPosition (const InputPointType &x, JacobianPositionType &jac) const override |
| |
| virtual ::itk::LightObject::Pointer | CreateAnother () const |
| |
| const InputPointType & | GetCenter () const |
| |
| const FixedParametersType & | GetFixedParameters () const override |
| |
| InverseTransformBasePointer | GetInverseTransform () const override |
| |
| virtual const MatrixType & | GetMatrix () const |
| |
| const OutputVectorType & | GetOffset () const |
| |
| const ParametersType & | GetParameters () const override |
| |
| TransformCategoryType | GetTransformCategory () const override |
| |
| const OutputVectorType & | GetTranslation () const |
| |
| bool | IsLinear () const override |
| |
| void | SetFixedParameters (const FixedParametersType &) override |
| |
| void | SetParameters (const ParametersType ¶meters) override |
| |
| OutputCovariantVectorType | TransformCovariantVector (const InputCovariantVectorType &vector) const override |
| |
| OutputVectorPixelType | TransformCovariantVector (const InputVectorPixelType &vector) const override |
| |
| OutputDiffusionTensor3DType | TransformDiffusionTensor3D (const InputDiffusionTensor3DType &tensor) const override |
| |
| OutputVectorPixelType | TransformDiffusionTensor3D (const InputVectorPixelType &tensor) const override |
| |
| OutputPointType | TransformPoint (const InputPointType &point) const override |
| |
| OutputSymmetricSecondRankTensorType | TransformSymmetricSecondRankTensor (const InputSymmetricSecondRankTensorType &tensor) const override |
| |
| OutputVectorPixelType | TransformSymmetricSecondRankTensor (const InputVectorPixelType &tensor) const override |
| |
| OutputVectorType | TransformVector (const InputVectorType &vector) const override |
| |
| OutputVnlVectorType | TransformVector (const InputVnlVectorType &vector) const override |
| |
| OutputVectorPixelType | TransformVector (const InputVectorPixelType &vector) const override |
| |
| virtual void | SetMatrix (const MatrixType &matrix) |
| |
| void | SetOffset (const OutputVectorType &offset) |
| |
| void | SetCenter (const InputPointType ¢er) |
| |
| void | SetTranslation (const OutputVectorType &translation) |
| |
| bool | GetInverse (Self *inverse) const |
| |
| virtual void | ComputeJacobianWithRespectToParametersCachedTemporaries (const InputPointType &p, JacobianType &jacobian, JacobianType &) const |
| |
| void | CopyInFixedParameters (const FixedParametersValueType *const begin, const FixedParametersValueType *const end) override |
| |
| void | CopyInParameters (const ParametersValueType *const begin, const ParametersValueType *const end) override |
| |
| unsigned int | GetInputSpaceDimension () const override |
| |
| bool | GetInverse (Self *) const |
| |
| virtual NumberOfParametersType | GetNumberOfFixedParameters () const |
| |
| virtual NumberOfParametersType | GetNumberOfLocalParameters () const |
| |
| NumberOfParametersType | GetNumberOfParameters () const override |
| |
| unsigned int | GetOutputSpaceDimension () const override |
| |
| std::string | GetTransformTypeAsString () const override |
| |
| | itkCloneMacro (Self) |
| |
| void | SetParametersByValue (const ParametersType &p) override |
| |
| virtual OutputCovariantVectorType | TransformCovariantVector (const InputCovariantVectorType &vector, const InputPointType &point) const |
| |
| virtual OutputVectorPixelType | TransformCovariantVector (const InputVectorPixelType &vector, const InputPointType &point) const |
| |
| virtual OutputDiffusionTensor3DType | TransformDiffusionTensor3D (const InputDiffusionTensor3DType &tensor, const InputPointType &point) const |
| |
| virtual OutputVectorPixelType | TransformDiffusionTensor3D (const InputVectorPixelType &tensor, const InputPointType &point) const |
| |
virtual
OutputSymmetricSecondRankTensorType | TransformSymmetricSecondRankTensor (const InputSymmetricSecondRankTensorType &tensor, const InputPointType &point) const |
| |
| virtual OutputVectorPixelType | TransformSymmetricSecondRankTensor (const InputVectorPixelType &tensor, const InputPointType &point) const |
| |
| virtual OutputVectorType | TransformVector (const InputVectorType &vector, const InputPointType &point) const |
| |
| virtual OutputVnlVectorType | TransformVector (const InputVnlVectorType &vector, const InputPointType &point) const |
| |
| virtual OutputVectorPixelType | TransformVector (const InputVectorPixelType &vector, const InputPointType &point) const |
| |
| virtual void | UpdateTransformParameters (const DerivativeType &update, ParametersValueType factor=1.0) |
| |
| | itkLegacyMacro (virtual void ComputeJacobianWithRespectToPosition(const InputPointType &x, JacobianType &jacobian) const) |
| |
| | itkLegacyMacro (virtual void ComputeInverseJacobianWithRespectToPosition(const InputPointType &x, JacobianType &jacobian) const) |
| |
| virtual void | CopyInFixedParameters (const FixedParametersValueType *const begin, const FixedParametersValueType *const end)=0 |
| |
| virtual void | CopyInParameters (const ParametersValueType *const begin, const ParametersValueType *const end)=0 |
| |
| virtual void | SetFixedParameters (const FixedParametersType &)=0 |
| |
| virtual void | SetParameters (const ParametersType &)=0 |
| |
| virtual void | SetParametersByValue (const ParametersType &p)=0 |
| |
| unsigned long | AddObserver (const EventObject &event, Command *) |
| |
| unsigned long | AddObserver (const EventObject &event, Command *) const |
| |
| virtual void | DebugOff () const |
| |
| virtual void | DebugOn () const |
| |
| Command * | GetCommand (unsigned long tag) |
| |
| bool | GetDebug () const |
| |
| MetaDataDictionary & | GetMetaDataDictionary () |
| |
| const MetaDataDictionary & | GetMetaDataDictionary () const |
| |
| virtual ModifiedTimeType | GetMTime () const |
| |
| virtual const TimeStamp & | GetTimeStamp () const |
| |
| bool | HasObserver (const EventObject &event) const |
| |
| void | InvokeEvent (const EventObject &) |
| |
| void | InvokeEvent (const EventObject &) const |
| |
| virtual void | Modified () const |
| |
| void | Register () const override |
| |
| void | RemoveAllObservers () |
| |
| void | RemoveObserver (unsigned long tag) |
| |
| void | SetDebug (bool debugFlag) const |
| |
| void | SetReferenceCount (int) override |
| |
| void | UnRegister () const noexceptoverride |
| |
| void | SetMetaDataDictionary (const MetaDataDictionary &rhs) |
| |
| void | SetMetaDataDictionary (MetaDataDictionary &&rrhs) |
| |
| virtual void | SetObjectName (std::string _arg) |
| |
| virtual const std::string & | GetObjectName () const |
| |
| virtual void | Delete () |
| |
| virtual int | GetReferenceCount () const |
| |
| | itkCloneMacro (Self) |
| |
| void | Print (std::ostream &os, Indent indent=0) const |
| |

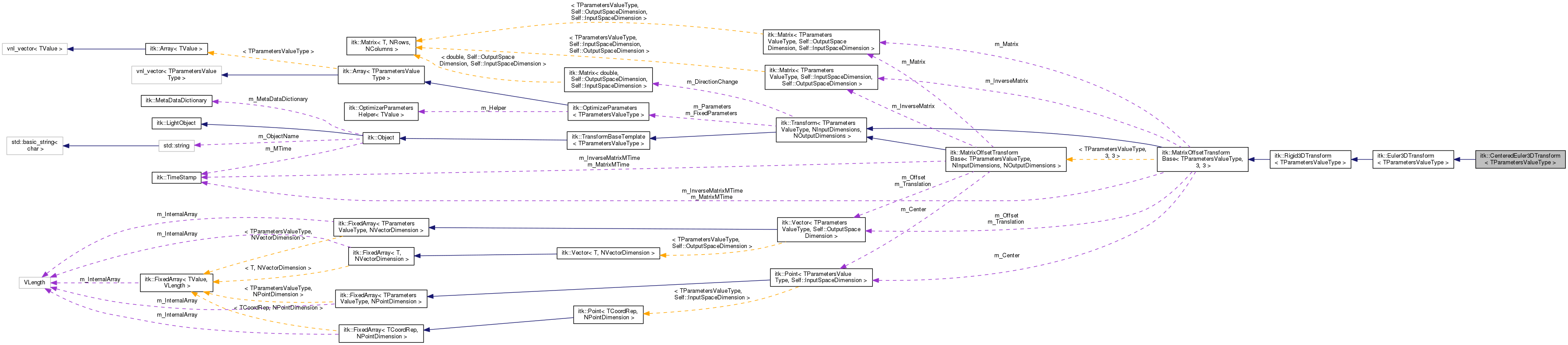
 Inheritance diagram for itk::CenteredEuler3DTransform< TParametersValueType >:
Inheritance diagram for itk::CenteredEuler3DTransform< TParametersValueType >: 1.8.5
1.8.5